| | |
|---|
| | | #include "Common.h" |
|---|
| | | #include "Log.h" |
|---|
| | | #include "SecsTestDlg.h" |
|---|
| | | #include <chrono> |
|---|
| | | #include <thread> |
|---|
| | | |
|---|
| | | |
|---|
| | | #ifdef _DEBUG |
|---|
| | | #define new DEBUG_NEW |
|---|
| | | #endif |
|---|
| | | |
|---|
| | | // Image |
|---|
| | | #define IMAGE_ROBOT 2 |
|---|
| | | |
|---|
| | | #define INDICATE_BONDER1 1 |
|---|
| | | #define INDICATE_BONDER2 2 |
|---|
| | |
|---|
| | | ON_UPDATE_COMMAND_UI(ID_MENU_WND_LOG, &CServoDlg::OnUpdateMenuWndLog) |
|---|
| | | ON_COMMAND(ID_MENU_HELP_ABOUT, &CServoDlg::OnMenuHelpAbout) |
|---|
| | | ON_WM_INITMENUPOPUP() |
|---|
| | | ON_WM_ERASEBKGND() |
|---|
| | | END_MESSAGE_MAP() |
|---|
| | | |
|---|
| | | |
|---|
| | |
|---|
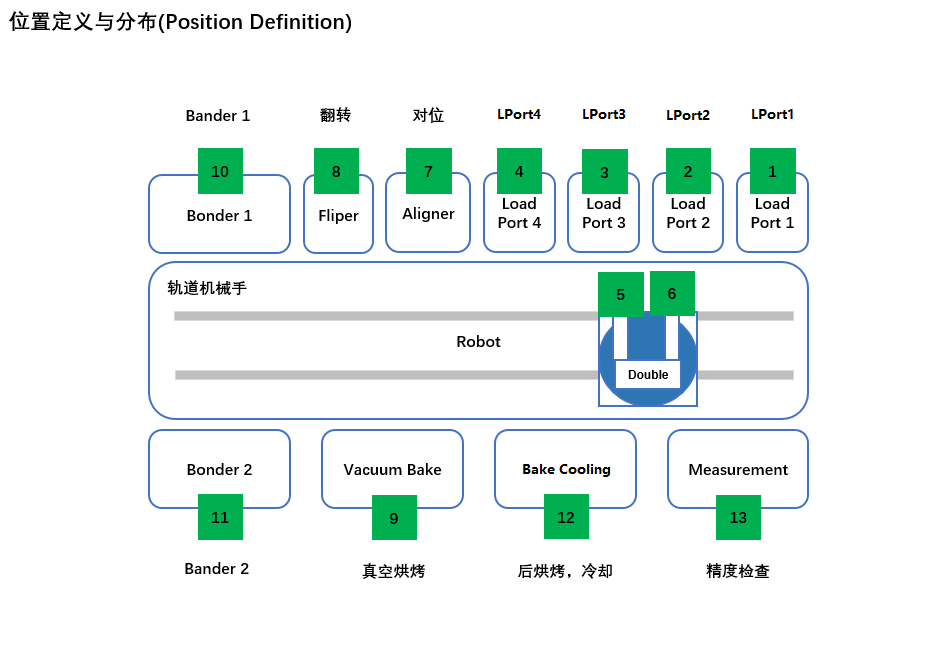
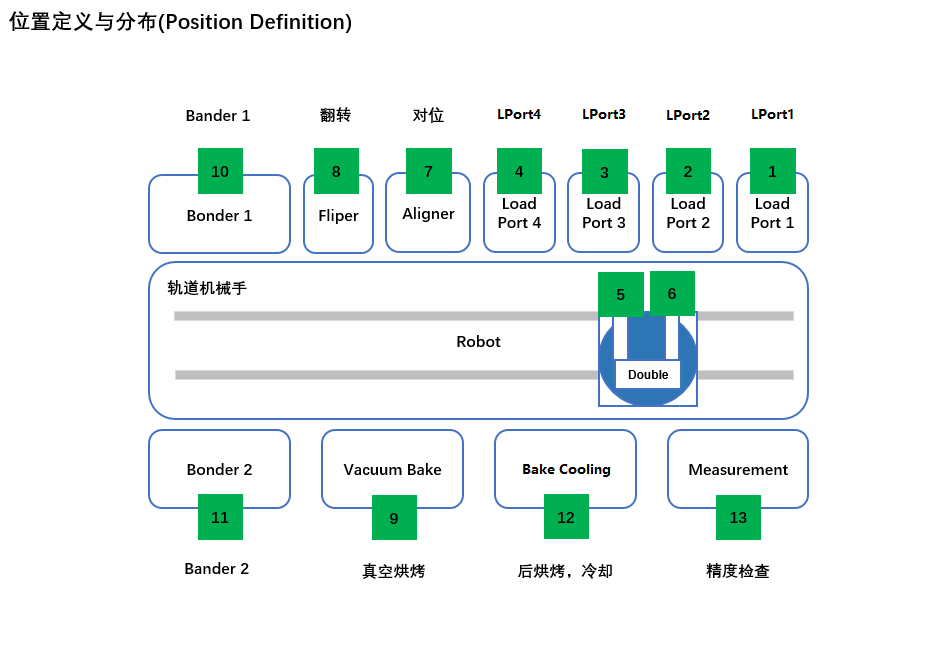
| | | strPath.Format(_T("%s\\res\\Servo001.bmp"), (LPTSTR)(LPCTSTR)theApp.m_strAppDir); |
|---|
| | | m_pGraph->AddImage(1, (LPTSTR)(LPCTSTR)strPath, 0, 0); |
|---|
| | | |
|---|
| | | strPath.Format(_T("%s\\res\\Robot001.bmp"), (LPTSTR)(LPCTSTR)theApp.m_strAppDir); |
|---|
| | | m_pGraph->AddImage(IMAGE_ROBOT, (LPTSTR)(LPCTSTR)strPath, 170, 270); |
|---|
| | | |
|---|
| | | // 添加指示器 |
|---|
| | | // Bonder |
|---|
| | |
|---|
| | | |
|---|
| | | |
|---|
| | | // Robot |
|---|
| | | m_pGraph->AddIndicateBox(INDICATE_ROBOT_ARM1, 620, 294, 48, RGB(22, 22, 22), |
|---|
| | | m_pGraph->AddIndicateBox(INDICATE_ROBOT_ARM1, 190, 294, 48, RGB(22, 22, 22), |
|---|
| | | RGB(255, 127, 39), RGB(0, 176, 80)); |
|---|
| | | m_pGraph->SetBoxText(INDICATE_ROBOT_ARM1, "5", "Robot"); |
|---|
| | | m_pGraph->AddIndicateBox(INDICATE_ROBOT_ARM2, 673, 294, 48, RGB(22, 22, 22), |
|---|
| | | m_pGraph->AddIndicateBox(INDICATE_ROBOT_ARM2, 243, 294, 48, RGB(22, 22, 22), |
|---|
| | | RGB(255, 127, 39), RGB(0, 176, 80)); |
|---|
| | | m_pGraph->SetBoxText(INDICATE_ROBOT_ARM2, "6", "Robot"); |
|---|
| | | |
|---|
| | |
|---|
| | | m_btnLog.Invalidate(); |
|---|
| | | } |
|---|
| | | |
|---|
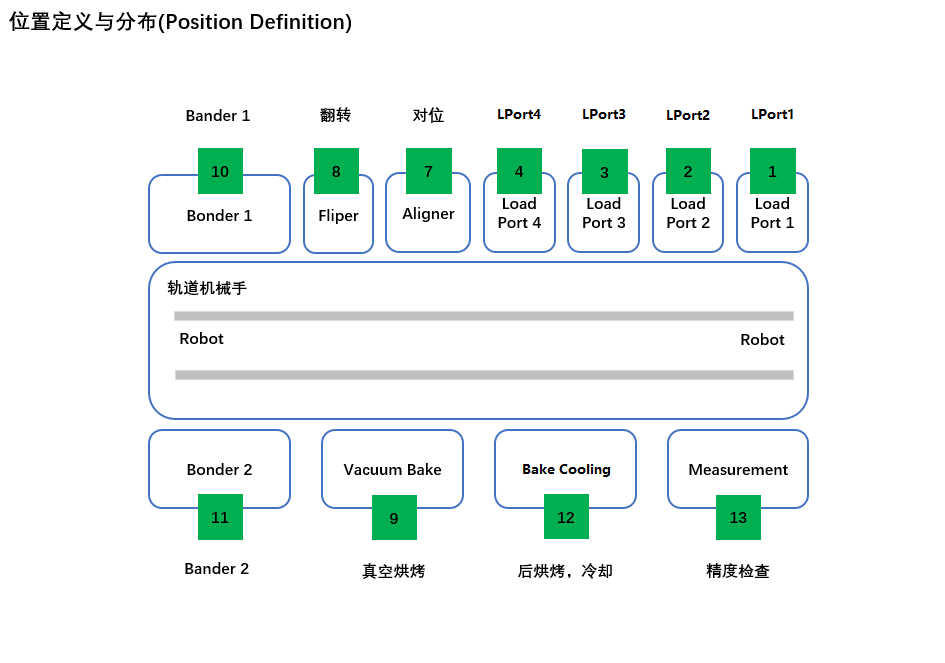
| | | void CServoDlg::UpdateRobotPosition(float percentage) |
|---|
| | | { |
|---|
| | | // 限制百分比范围在 [0, 1] 之间 |
|---|
| | | if (percentage < 0.0f) percentage = 0.0f; |
|---|
| | | if (percentage > 1.0f) percentage = 1.0f; |
|---|
| | | |
|---|
| | | // 根据百分比计算目标 X 坐标 |
|---|
| | | int startX = m_pGraph->GetImage(IMAGE_ROBOT)->x; |
|---|
| | | int endX = static_cast<int>(170 + percentage * (700 - 170)); |
|---|
| | | |
|---|
| | | int arm1Offset = 20; // 从图片到ARM1的偏移 |
|---|
| | | int arm2Offset = 73; // 从图片到ARM2的偏移 |
|---|
| | | |
|---|
| | | // 计算移动所需的时间 |
|---|
| | | int distance = abs(endX - startX); |
|---|
| | | int duration = static_cast<int>((distance / 100.0) * 1000); |
|---|
| | | |
|---|
| | | auto startTime = std::chrono::steady_clock::now(); |
|---|
| | | auto endTime = startTime + std::chrono::milliseconds(duration); |
|---|
| | | |
|---|
| | | // 开始平滑移动 |
|---|
| | | while (std::chrono::steady_clock::now() < endTime) { |
|---|
| | | auto currentTime = std::chrono::steady_clock::now(); |
|---|
| | | float progress = std::chrono::duration<float, std::milli>(currentTime - startTime).count() / duration; |
|---|
| | | progress = min(progress, 1.0f); |
|---|
| | | |
|---|
| | | // 根据进度计算当前位置 |
|---|
| | | int currentX = static_cast<int>(startX + progress * (endX - startX)); |
|---|
| | | m_pGraph->UpdateImageCoordinates(IMAGE_ROBOT, currentX, 270); |
|---|
| | | m_pGraph->UpdateIndicateBoxCoordinates(INDICATE_ROBOT_ARM1, currentX + arm1Offset, 294); |
|---|
| | | m_pGraph->UpdateIndicateBoxCoordinates(INDICATE_ROBOT_ARM2, currentX + arm2Offset, 294); |
|---|
| | | |
|---|
| | | // 刷新界面 |
|---|
| | | Invalidate(); |
|---|
| | | UpdateWindow(); |
|---|
| | | |
|---|
| | | // 控制帧率约为 60 FPS |
|---|
| | | std::this_thread::sleep_for(std::chrono::milliseconds(16)); |
|---|
| | | } |
|---|
| | | |
|---|
| | | // 确保最后位置精确到目标位置 |
|---|
| | | m_pGraph->UpdateImageCoordinates(IMAGE_ROBOT, endX, 270); |
|---|
| | | m_pGraph->UpdateIndicateBoxCoordinates(INDICATE_ROBOT_ARM1, endX + arm1Offset, 294); |
|---|
| | | m_pGraph->UpdateIndicateBoxCoordinates(INDICATE_ROBOT_ARM2, endX + arm2Offset, 294); |
|---|
| | | |
|---|
| | | // 界面重绘 |
|---|
| | | Invalidate(); |
|---|
| | | } |
|---|
| | | |
|---|
| | | void CServoDlg::OnSize(UINT nType, int cx, int cy) |
|---|
| | | { |
|---|
| | | CDialogEx::OnSize(nType, cx, cy); |
|---|
| | |
|---|
| | | |
|---|
| | | CDialogEx::OnMove(x, y); |
|---|
| | | } |
|---|
| | | |
|---|
| | | |
|---|
| | | BOOL CServoDlg::OnEraseBkgnd(CDC* pDC) |
|---|
| | | { |
|---|
| | | // TODO: 在此添加消息处理程序代码和/或调用默认值 |
|---|
| | | |
|---|
| | | //return CDialogEx::OnEraseBkgnd(pDC); |
|---|
| | | return TRUE; |
|---|
| | | } |
|---|


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}